Совместная работа датчиков приближения
- time:2025-07-21 08:37:16
- Нажмите:0
Mastering Proximity Sensors in CoppeliaSim: Your Virtual Robotics Testing Ground
The ability for robots to sense their surroundings is fundamental. Whether avoiding obstacles on a factory floor, detecting the presence of an object to be manipulated, or navigating complex terrain, proximity sensors serve as the critical “touchless feelers” of the robotic world. But developing and testing these sensor algorithms directly on physical hardware can be costly, time-consuming, and sometimes risky. This is where robotics simulation becomes indispensable. CoppeliaSim, formerly known as V-REP, stands out as a premier, versatile platform for simulating entire robotic systems, including the intricate behavior of various sensor types. Understanding how to model, implement, and leverage proximity sensors in CoppeliaSim is a cornerstone skill for efficient virtual robotics development.
Why Simulate Proximity Sensors?
Before diving into CoppeliaSim, consider the advantages of simulation for sensor development:
- Cost Reduction: Eliminates the need for expensive physical sensor prototypes and robotic platforms during initial development and testing phases.
- Rapid Prototyping: Allows engineers and researchers to quickly iterate on sensor configurations (range, field of view, position), algorithms, and control strategies without hardware modifications.
- Safety: Enables testing dangerous scenarios (e.g., high-speed collisions, hazardous environments) within a perfectly safe virtual space.
- Repeatability & Control: Achieve perfectly identical test conditions every time, a near-impossible feat in the real world. Precisely control object positions, environmental variables, and sensor noise.
- Early Integration: Test how the sensor data interacts with perception algorithms and robot controllers before physical system integration.
CoppeliaSim: A Sensor Simulation Powerhouse
CoppeliaSim excels in simulating a wide array of sensors crucial for robotics, with proximity sensors being a primary category. Its strength lies in:
- Diverse Sensor Models: CoppeliaSim offers built-in models for several proximity sensor types, including:
- Inductive Sensors: Simulating detection of metallic objects without contact.
- Capacitive Sensors: Modeled to detect the presence of conductive or non-conductive materials.
- Ultrasonic Sensors (Distance Sensors): Emitting sound pulses and measuring time-of-flight to calculate distance to obstacles. This is often implemented using the датчик приближения object type configured appropriately.
- Infrared (IR) Sensors: Often used for short-range obstacle detection or line following.
- Laser Scanners (2D/3D Lidar): While technically providing a dense point cloud, they fundamentally rely on proximity/distance measurement principles and are simulated extensively. Vision sensors complement these by providing rich visual data.
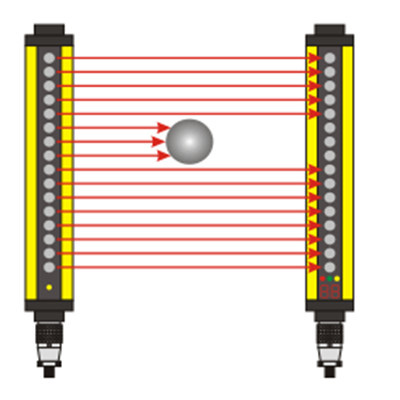
- Physics-Based Detection: CoppeliaSim uses its underlying Bullet Physics engine for collision detection, providing highly realistic interactions. When a датчик приближения detects an object, it’s because the physics engine calculates an intersection or near-intersection between the sensor’s defined detection volume (e.g., cone, cylinder, ray) and objects in the scene. This ensures sensor outputs reflect real-world physics.
- Highly Configurable Parameters: For each sensor, users can define critical parameters:
- Detection Range: Minimum and maximum distance for detection.
- Field of View (FOV): The angular spread (aperture angle) for sensors like IR or ultrasonic cones.
- Position and Orientation: Precisely mount the sensor relative to the robot body.
- Response Parameters: Adjust sensitivity, add noise models to simulate real-world sensor imperfections, define detection thresholds.
- Intuitive Scripting & APIs: Sensors within CoppeliaSim are typically controlled and read via scripts attached to the sensor object or the robot model. CoppeliaSim’s powerful API, accessible through Lua, Python, MATLAB, Java, or C++, allows developers to:
- Read sensor measurements (e.g., detection state
bool, measured distance float, detected object handle).
- Dynamically adjust sensor parameters during simulation.
- Process sensor data to trigger robot actions, build environment maps, or implement sophisticated perception algorithms.
Implementing and Using Proximity Sensors in CoppeliaSim
Setting up a basic proximity sensor workflow usually involves:
- Adding the Sensor: Drag and drop the desired sensor type (e.g., Proximity sensor or Vision sensor plugin) from the CoppeliaSim model browser onto your robot model or scene.
- Positioning & Orientation: Use the translation and rotation tools to place the sensor correctly on your robot. Precise placement is crucial for realistic behavior.
- Configuring Parameters: Double-click the sensor object to open its properties. Set the Range, Angle (FOV), and potentially adjust the detection volume shape. Consider enabling Explicit Handling for more direct control if needed. Configure display options if desired.
- Attaching a Script: Add a child script (usually Lua) to the sensor or a related control object (e.g., the robot base).
- Reading Sensor Data: Within the script, use the relevant API function (e.g.,
sim.readProximitySensor(sensorHandle) for proximity sensors). This function typically returns detection state and distance. For vision sensors, functions like sim.getVisionSensorImg are used.
- Processing and Reacting: Write logic to interpret the sensor readings. For instance:
-- Example Lua snippet (simplified)
sensorHandle = sim.getObjectHandle('ProximitySensor')
result, distance, detectedObjectHandle = sim.readProximitySensor(sensorHandle)
if result > 0 then -- Object detected
dist = distance
sim.addLog(sim.verbosity_scriptinfos, "Object detected at distance: "..dist)
-- Trigger robot action, e.g., stop motors, change direction
end
- Simulation & Testing: Run the simulation and observe the sensor behavior. Introduce obstacles dynamically and verify the robot responds correctly based on the simulated sensor inputs. Test various scenarios and sensor configurations.
Beyond Basic Detection: Applications and Best Practices
Proximity sensors in CoppeliaSim enable a vast range of applications:
- Obstacle Avoidance: The quintessential application. Robots navigate complex environments using IR, ultrasonic, or laser scanner data.
- Object Detection & Localization: Detecting the presence and approximate position of objects for pick-and-place tasks.
- Conveyor Tracking: Using proximity sensors to detect objects on a moving conveyor belt.
- Collision Prevention: Safeguarding robot arms or mobile bases near sensitive equipment or humans. Sensor fusion with vision data enhances this significantly.
- Line Following: Simulating IR sensors used for tracking lines on the ground.
- Sensor Fusion Development: CoppeliaSim is ideal for prototyping systems that combine proximity sensors with cameras (vision sensors), IMUs, and encoders to build a more robust perception system.
Best practices for effective simulation include:
- Realistic Parameters: Research real sensor specs and configure your датчик приближения parameters accordingly (range, FOV, noise levels).
- Sensor Noise Modeling: Incorporate noise models (Gaussian is common)